Optymalizacja efektywności maszyn używanych w przemyśle jest często niezbędna. Istnieje wiele różnych sposobów osiągnięcia tego celu, takich jak dostosowanie kąta natarcia łopat wentylatorów, kontrola ciśnienia w kompresorze lub regulacja pracy maszyn bez konieczności zmiany prędkości obrotowej. Ostatnią z wymienionych opcji można zrealizować zarówno mechanicznie, za pomocą przekładni, jak i elektrycznie, regulując wydajność silników elektrycznych. W przypadku regulacji prędkości za pomocą elektrycznych środków, istnieje kilka opcji do rozważenia. Jednym z nich jest wykorzystanie silników o dwóch stałych stopniach wydajności, co umożliwia skokową zmianę tempa pracy i efektywności. Jeśli jednak potrzebna jest dokładna kontrola prędkości, warto rozważyć wykorzystanie przemienników częstotliwości. Dzięki nim można precyzyjnie i płynnie regulować pracę maszyn, co może znacząco wpłynąć na efektywność procesów przemysłowych.
Rodzaje algorytmów sterowania stosowanych w przemiennikach częstotliwości

Przemienniki częstotliwości służą do regulacji prędkości obrotowej silników elektrycznych, z którymi razem tworzą układy napędowe. W zależności od aplikacji wybiera się różne algorytmy sterowania: skalarne lub wektorowe.
Krótko o przemiennikach częstotliwości
Czy falownik i przemiennik częstotliwości to to samo?
Przemiennik częstotliwości, zwany również przetwornicą częstotliwości lub przekształtnikiem energoelektronicznym, jest urządzeniem umożliwiającym regulację częstotliwości sygnałów wyjściowych w stosunku do częstotliwości sieciowej. Warto jednak podkreślić, że często używa się błędnej terminologii, określając je mianem "falowników". Dlaczego ta terminologia jest nieprawidłowa? Otóż "falownik" to jedynie element przetwornicy częstotliwości, która zbudowana jest również z prostownika wejściowego, układu pośredniczącego oraz układ sterowania i zabezpieczeń.
Warto zaznaczyć, że istnieją również przemienniki częstotliwości, które nie wykorzystują układu pośredniczącego. Jednak są to rozwiązania niestandardowe, dostosowane do maszyn o dużych mocach i pracujących przy niskich częstotliwościach.
Falownik jest tylko elementem wyjściowym generującym sygnały o odpowiedniej częstotliwości. Jednak aby określić go jako samodzielne urządzenie, musiałby być zasilany bezpośrednio z sieci napięcia stałego. Takie zastosowania są możliwe i nie są jedynie teoretycznymi koncepcjami.
Bardzo trafnym określeniem, szczególnie w literaturze anglojęzycznej, jest termin "drive" lub tłumacząc na język polski - po prostu "napęd".
Rodzaje przemienników częstotliwości
Wracając do falownika, to jego głównym zadaniem jest konwersja napięcia lub prądu stałego na sygnał zmienny. Warto zaznaczyć, że wyróżniamy dwie główne kategorie przetworników: napięciowe przemienniki częstotliwości (VSI - Voltage Source Inverter) oraz prądowe przemienniki częstotliwości (CSI - Current Source Inverter). Różnica między nimi wynika z ich budowy i zasady działania. W skrócie, przemienniki napięciowe korzystają z energii zgromadzonej w obwodzie pośredniczącym prądu stałego (szyba DC), który jest zasilany przez baterię kondensatorów. Modulacja napięcia wyjściowego jest osiągana przez użycie tyrystorów IGBT.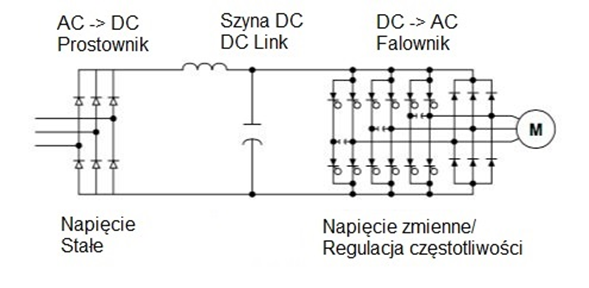
Przemienniki prądowe wykorzystują energię w obwodzie pośredniczącym skupioną w indukcyjności, a do modulacji prądu wyjściowego stosuje się tyrystory GTO lub SGCT.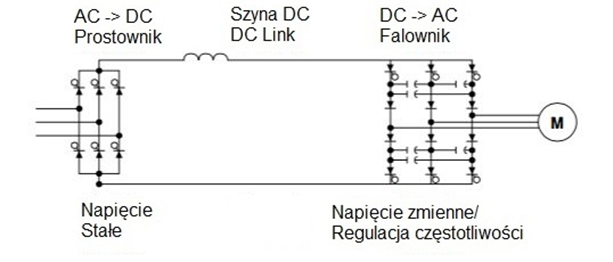
Większość dostępnych na rynku rozwiązań to przemienniki napięciowe. Przemienniki prądowe są przeważnie używane w specyficznych aplikacjach, gdzie można wykorzystać ich zalety, takie jak możliwość pracy przy bardzo długich liniach zasilających lub współpraca z istniejącymi silnikami, które nie są przystosowane do pracy z przemiennikami częstotliwości.
Przemienniki częstotliwości dzielimy na jednofazowe oraz trójfazowe, przy czym przemienniki trójfazowe mogą być zasilane zarówno jednofazowo, jak i trójfazowo.
Algorytmy sterowania
Na rynku dostępne są przemienniki częstotliwości oferujące dwa różne algorytmy sterowania - skalarne oraz wektorowe.
Na czym polega sterowanie skalarne?
Zacznijmy od omówienia algorytmu sterowania skalarnego, zwanego znany również jako sterowanie U/f. Jest to najprostszy w implementacji algorytm i służący do podstawowej regulacji prędkości obrotowej. W tym przypadku przemiennik reguluje prędkość obrotową poprzez zmianę częstotliwości napięcia zasilającego silnik, zachowując stały stosunek do wartości skutecznej napięcia. Sterowanie skalarnie znajduje zastosowanie w aplikacjach, gdzie moment obrotowy nie jest krytyczny i obciążenia są niskie lub zmienne. Przykłady takich zastosowań obejmują pompy, wentylatory, sprężarki i dmuchawy. W tych aplikacjach nie jest konieczna kontrola rzeczywistej prędkości obrotowej, choć można wykorzystać układy enkoderowe do utrzymania stałej prędkości obrotowej.
Sterowanie prędkością oparte na podstawowych parametrach silnika umożliwia stosunkowo prostą parametryzację przemienników częstotliwości. Wymagane są podstawowe znaminowe parametry silnika, takie jak napięcie, częstotliwość, prąd oraz prędkość lub ilość par biegunów.
Wady przemienników ze sterowaniem skalarnym obejmują przede wszystkim brak możliwości regulacji momentu obrotowego oraz jego ograniczoną wartość przy niskich częstotliwościach. Ponadto, brak kontroli pola magnetycznego silnika może prowadzić do długotrwałych stanów przejściowych i oscylacji prędkości obrotowej w okolicach wartości zadanej. Zaletą zaś jest możliwość sterowania wieloma silnikami jednocześnie.
Algorytm sterowania skalarne jest dostępny zarówno w przemiennikach jednofazowych, jak i trójfazowych.
Przemiennik częstotliwości z algorytmem wektorowym, zwanym dokładniej z wektorową orientacją pola, stanowi rozwiązanie znacznie bardziej zaawansowane i wszechstronne. Przemienniki tego rodzaju umożliwiają precyzyjną regulację prędkości oraz pełną kontrolę momentu obrotowego silnika w całym zakresie regulacji, zachowując jego stałą wartość. Sterowanie wektorowe opiera się na niezależnym sterowaniu strumieniem uzwojenia w silniku oraz momentem. Precyzja regulacji prędkości w tym przypadku wynosi imponujące 0,01%.
Tak dokładny sposób regulacji wymaga dostarczenia przemiennikowi częstotliwości szczegółowych danych dotyczących silnika. Oprócz standardowych parametrów znamionowych, takich jak napięcie, częstotliwość, prąd oraz prędkość lub ilość par biegunów, niezbędne są również parametry elektryczne uzwojeń. Niestety, producenci rzadko udostępniają te informacje. Jednak nie stanowi to problemu podczas konfiguracji urządzenia, ponieważ przemienniki częstotliwości często wyposażone są w funkcję automatycznego dostosowywania (auto-tuning). Ta funkcja polega na zasilaniu silnika stałym napięciem, co pozwala przemiennikowi zmierzyć rzeczywiste wartości parametrów elektrycznych, takie jak rezystancja i indukcyjność stojana oraz wirnika. Dzięki wbudowanemu modelowi matematycznemu silnika i wymienionym parametrom, przemiennik częstotliwości jest w stanie dostosować wartość momentu obrotowego w dowolnym momencie.
Na czym polega sterowanie wektorowe?
Drugim omawiamy algorytmem jest sterowanie wektorowe, które znajduje swoje zastosowanie w sytuacjach, gdzie konieczne jest utrzymanie stałych wartości momentu obrotowego i prędkości, zwłaszcza gdy obciążenie na wale silnika ulega zmianom w trakcie pracy. Ten zaawansowany algorytm jest szczególnie efektywny w przypadkach, gdy aplikacja napędowa wymaga precyzyjnej regulacji prędkości obrotowej, co często wiąże się z wykorzystaniem enkodera. Przykłady takich aplikacji obejmują:
- Napędy dźwigów i podnośników - gdzie istnieje potrzeba generowania dużych momentów obrotowych na starcie oraz zapewnienia płynnej pracy.
- Młyny i miksery - w których wymagane jest utrzymanie stabilnej prędkości oraz zapewnienie dużego momentu obrotowego.<
- Wirówki - gdzie konieczne jest generowanie wysokich momentów obrotowych oraz precyzyjna regulacja prędkości przy rozruchu i hamowaniu.
- Nawijarki - w przypadku których konieczna jest regulacja momentu w celu osiągnięcia odpowiedniego naprężenia materiału.
- Przenośniki - gdzie istnieje potrzeba precyzyjnego sterowania ruchem oraz generowania dużego momentu obrotowego podczas przemieszczania obciążonej maszyny.
Jednak istnieje ograniczenie w stosowaniu sterowania wektorowego, które polega na możliwości sterowania tylko jednym silnikiem za pomocą jednego przemiennika częstotliwości. Wadami tego rozwiązania, są przede wszystkim wyższe koszty oraz większy nakład pracy wymagany do ich uruchomienia. Algorytm ten dostępne jest wyłącznie w przemiennikach trójfazowych.
Jaki algorytm będzie dla aplikacji najlepszy?
Teoretycznie odpowiedź na to pytanie powinna być prosta i wynikać z wcześniejszych opisów zastosowań danego algorytmu. Jednakże wybór ma również wpływ na inne czynniki. Napędy umożliwiające sterowanie wektorowe, z uwagi na bardziej rozbudowane oprogramowanie wewnętrzne, zazwyczaj dysponują mniejszą ilością dostępnej pamięci wewnętrznej do programowania bloków funkcyjnych. Dlatego, jeśli planujemy implementację pewnych funkcji logicznych w przemienniku częstotliwości, musimy to wziąć pod uwagę.
Innym ważnym aspektem jest sposób regulacji prędkości przez dany przemiennik i jego wpływ na pracę silnika i całą maszynę. W przypadku sterowania wektorowego, które pozwala na utrzymanie stałego momentu w określonym punkcie pracy, konieczne jest częste dostosowywanie prędkości obrotowej silnika. Zmiany te nie są tak zauważalne jak w przypadku sterowania skalarnego, ale występują. W maszynach o dużej mocy, gdzie obciążenie wału jest znacznie zmienne, może to prowadzić do występowania wysokich wartości drgań skrętnych. To zjawisko może prowadzić do poważnych awarii mechanicznych, włączając w to urwanie wału. W takich sytuacjach konieczne jest dokładne zbadanie całego układu napędowego, zarówno pod względem mechanicznym, jak i elektrycznym. Należy również szczególnie dokładnie dobrać parametry regulatorów w przemienniku częstotliwości oraz w systemie sterującym daną maszyną (np. DCS).
Podobne artykuły



Zobacz również